プレーヤーの読み込み....
ワルドがどこにあるAI検出するために、


 (2) | 2018年11月8日 |
(2) | 2018年11月8日 | 
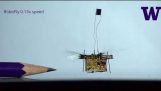
ワルドは彼にワルドとポイントを見つけるために構築されたロボットがあります. ロボットアームはUARM金属ためPYARM Pythonライブラリを使用してラズベリーパイによって制御されます. 初期化アームが延長し、下記のキャンバスの写真を撮るように指示されたら. その後、写真から顔を見つけて抽出するためにOpenCVのを使用しています. 顔は訓練されたワルドモデルに対して、それぞれを比較してGoogleの自動MLビジョンサービスに送信されます. もし95%の自信を持って試合 (00.95) 以上が発見され、ロボットアームは、それに一致する面と点の座標に延在するように指示されます. 写真の複数Waldosがある場合には、それぞれ1を指すようになります.
唯一のプロトタイプながら, 最速ワルドは、ほとんどの5歳児よりも優れている4.45秒となっているマッチを指摘しているあります.
高度な関連記事